第八届中国高校智能机器人创意大赛来啦,快来围观报名吧!
第八届中国高校智能机器人创意大赛
已于2025年3月18日开始报名啦!
想了解学习ROS的小伙伴千万别错过~
中心持续为您提供大赛咨询及相关技术支持
报名通道

专项赛一:基于ROS技术应用的机器人挑战赛
主办单位:中国高校智能机器人创意大赛组委会
承办单位:浙江省余姚市人民政府
浙江大学机器人研究院
技术支持:机器人操作系统(ROS)教育基金会
国家软件人才国际培训基地(上海)
宁波元森教育科技有限公司
重庆安尼森智能科技有限公司
......
机器人操作系统(Robot Operating System),简称ROS,起源于2007年斯坦福大学人工智能实验室。ROS的首要设计目标是在机器人研发领域提高代码复用率,缩短机器人研发周期,为了实现这一目标,ROS被设计为松散耦合的分布式架构,同时得益于点对点和精简集成设计、支持多种开发语言,开源免费等特性,ROS在短时间内积攒了全球众多使用者和开发者。2013年麻省理工学院科技评论(MIT Technology Review)更指出:“从2010年发布1.0版本以来,ROS已经成为机器人软件的事实标准(defacto standard)”。
为了传播ROS在机器人领域的优势特点,鼓励大学生学习ROS,特融入ROS机器人俄罗斯方块机器人专项赛。通过ROS平台与全球高校进行机器人技术交流,通过竞赛的方式提升大学生问题的解决能力、技术能力和团队协作能力,同时培养机器人开发工程师、机器视觉与人工智能算法工程师,响应国家科技人才培养战略。
比赛主要分为单臂机器人竞赛组和双臂机器人竞赛组两个组别。
2.1 单臂机器人竞赛组:比赛内容主要包括俄罗斯方块的识别、拾取和拼接三个部分。
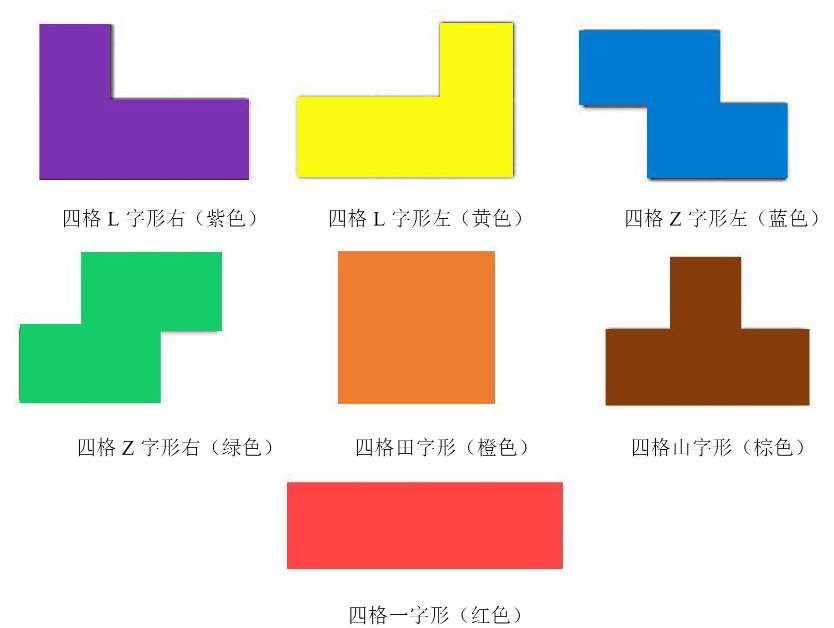
①俄罗斯方块的识别:在工作台面上随机摆放区平放有七种形状的俄罗斯方块(如下图所示),每种俄罗斯方块5个,共计35个,俄罗斯方块随机摆放后皆不重叠、相接。机器人需要通过加装视觉系统,识别俄罗斯方块的形状、位置和姿态。
②俄罗斯方块的拾取:基于识别结果计算出每个俄罗斯方块的拾取顺序和最终要拼接的组合形式,控制机器人依次拾取俄罗斯方块。
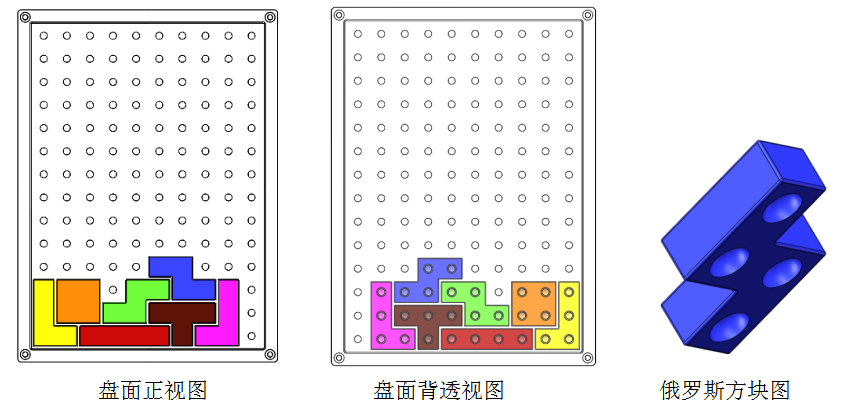
③俄罗斯方块的拼接:机器人需要将拾取的俄罗斯方块依次放置到一个14×10(行×列)的盘面中进行拼接。
2.2 双臂机器人竞赛组:比赛内容主要包括双臂机器人倒水服务以及人机协作两项任务。
①倒水服务:在工作台面上随机摆放有两种饮品,一瓶饮用水(怡宝350ml装)和一瓶可乐(可口可乐原味300ml);另外还有两个低透明度黑色塑料水杯(如下图所示)。双臂机器人需要自主识别饮品和水杯的位置,然后将两种饮品分别倒入两个塑料水杯中,最后将饮品和水杯放到工作台面上。

②人机协作:此任务将由参赛队员和双臂机器人共同完成,队员需要按顺序双手持小号篮球和小号足球(直径约12cm,如下图所示)站于双臂机器人前方。双臂机器人需要自主识别球的位置,将篮球从队员的手上接过,然后将篮球放置于工作台面上收纳筐中,然后按照同样方式将足球接过并放置于收纳筐(尺寸L30*W20*H12cm)中。

3.1 单臂机器人竞赛组
3.1.1 赛前抽签
比赛前提前至少一个小时进行抽签决定比赛次序,比赛按照抽签顺序进行。
3.1.2 赛前准备
①当场比赛参赛队伍有两分钟的准备时间,为确保比赛正常进行应提前将机器人部署到准备状态,同时将俄罗斯方块随机摆放到摆放区,裁判可随机调整摆放的俄罗斯方块;
3.1.3 比赛过程
比赛过程分为两个部分,第一部分是“必选任务”,第二部分是“进阶任务”。只有在单次比赛时间内提前完成“必选任务”的队伍才能解锁“进阶任务”,详细内容如下:
①必选任务:在规定比赛时间内,机器人将台面上随机摆放的七种俄罗斯方块(共计35块)中的至少34块自动拾取并有效拼接到盘面中,则视为完成必选任务。
②进阶任务:提前完成必选任务后则解锁进阶任务,裁判将盘面中拼接好的俄罗斯方块全部取出,随机摆放35块俄罗斯方块中的一部分(俄罗斯方块的种类和数量由裁判现场随机确认,但每个队伍相同)到摆放区,参赛队伍可以重新启动机器人进行俄罗斯方块的拾取和拼接,进阶任务的比赛时间为比赛总时长减去必选任务所用时间。
3.1.4 比赛要求
①俄罗斯方块的识别仅能使用开源视觉相机镜头和模组,图像的传输需要基于ROS通信,图像的处理算法应自主开发或二次开发,不能使用工业级智能视觉系统,且最多使用两个开源视觉相机镜头和模组。
②俄罗斯方块的拾取可以自由采用夹持或吸取等方式。
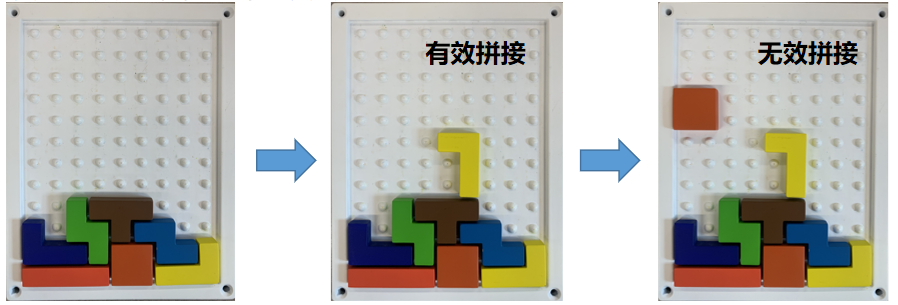
③俄罗斯方块的拼接需要遵循以下规则,每次拼接的俄罗斯方块不能孤立和超出盘面,即每个俄罗斯方块放置在盘面中后,此俄罗斯方块的下一层必须有俄罗斯方块与其有重叠相连部分(放置在第一层时除外),以此视为有效拼接,除此外都视为无效拼接,图示如下:
④必选任务中,盘面中至少包含三种及以上形状俄罗斯方块,如盘面中少于三种形状俄罗斯方块则不计分。
3.2 双臂机器人竞赛组
3.2.1 赛前抽签
比赛前提前至少一个小时进行抽签决定比赛次序。
3.2.2 赛前准备
①当场比赛参赛队伍有两分钟的准备时间,为确保比赛正常进行应快速将机器人部署到准备状态,同时将饮品和水杯随机摆放到工作台面,裁判可随机微调摆放的道具位置;
②选手准备好后或者两分钟准备时间到,裁判发出比赛开始指令并开始比赛计时,参赛选手可启动机器人,启动机器人后机器人应自动完成比赛任务。
3.2.3 比赛过程
比赛过程分为两个任务,不分先后,参赛队伍可以自行选择任务顺序。
①倒水服务:将饮品和水杯随机放置到工作台面至少距离双臂机器人的任一手臂末端工具最远端至少0.3m以上,饮品和水杯相互之间间隔位置不限定。双臂机器人自主识别工作台面上的饮品和水杯,然后打开饮品瓶盖,瓶盖非出厂状态为已经开启过。机器人需要一手持瓶,一手持杯将饮品倒入水杯中,两种饮品的顺序不做要求,杯中饮品至少超过水杯一半水位线且不能撒出,最后将瓶子和水杯放置在工作台面上任意位置即可。
②人机协作:参赛队员按顺序双手持小号篮球和小号足球站于双臂机器人前方,双手持球位置不限但手指必须全部触球,球的位置至少距离双臂机器人的任一手臂末端工具最远端至少0.3m以上。双臂机器人自主识别球的位置,双臂接过球后将球放置于收纳筐中。收纳筐的位置必须是随机的,距离不做要求。机器人接球过程中,参赛队员需要持球静止不能主观移动球的位置,放球过程中,球触及收纳筐之前,机器人双臂和球必须脱离。
3.2.4 比赛要求
①图像识别仅能使用开源视觉相机镜头和模组,图像的传输需要基于ROS通信,图像的处理算法应自主开发或二次开发,不能使用工业级智能视觉系统,且最多使用两个开源视觉相机镜头和模组。
②物体的拾取可以自由采用夹持或吸取等方式,饮品瓶盖可借助外部工具,只要是自主打开皆可。
单臂机器人竞赛组:
①使用的机器人手臂限串联六轴及以上,最大工作范围不超过1000mm;
③比赛过程中,机器人和视觉等比赛设备必须运行在ROS环境下;
④每个参赛队伍需准备专用参赛设备,不得交换或者混用;
⑤机器人不做其他限定,符合以上要求皆可。
双臂机器人竞赛组:
①双臂服务机器人单条手臂限串联六轴及以上;
②机器人及比赛设备供电电压不高于220V;
③比赛过程中,双臂服务机器人和传感系统必须运行在ROS环境下,其他辅助设备不做限定;
④机器人不做其他限定,符合以上要求皆可。
单臂机器人竞赛组:
①单次比赛时间为5分钟,以现场计时器为准,从裁判发出开始指令后计时,比赛时间结束或者所有比赛任务完成则比赛结束;
②每个队伍至少有两次机会,且取两次中最好成绩为最终成绩,所有队伍按照抽签顺序完成第一次比赛后再依次完成第二次比赛;
③参赛队伍也可以选择挑战第三次比赛机会,如进行第三次比赛,则取第三次比赛结果为最终成绩。
双臂机器人竞赛组:
①单次比赛时间为15分钟,以现场计时器为准,从裁判发出开始指令后计时,比赛时间结束或者所有比赛任务完成则比赛结束;比赛时间内,选手可以不限次数调试或者重启机器人,以单个任务最后一次自动运行结果计分。
②每个队伍至少有两次机会,且取两次中最好成绩为最终成绩。所有队伍按照抽签顺序完成第一次比赛后再依次完成第二次比赛。
6.1 计分
单臂机器人竞赛组:
①必选任务:盘面中有效拼接的俄罗斯方块完整行数,每一行得10分;
②进阶任务:盘面中有效拼接的俄罗斯方块完整行数,每一行得15分;
③提前完成所有比赛任务,且所有俄罗斯方块都为有效拼接,剩余比赛时间每一秒得1分;
④每个无效拼接的俄罗斯方块所涉及的行得0分。
双臂机器人竞赛组:
①倒水服务:
将塑料水杯拿起并离开工作台面得5分/个;
将饮品瓶子拿起并离开工作台面得5分/种;
将饮品倒入水杯并超过水杯一半水位线得10分/种;
将饮品洒在工作台面上扣5分/种;
②人机协作:
双臂将球拿起超过3秒得10分/个;
双臂将球按照要求放入收纳筐得10分/个;
双臂放球过程中,球触及收纳筐后双臂未脱离球扣5分/个;
6.2 成绩说明与获胜队伍
按照如下顺序确定获胜队伍:
①获得总分高的参赛队;
②无效拼接数量少的参赛队;
③完成比赛时间短的参赛队。
①抢先启动机器人开始比赛;
②比赛过程中任何不被允许的干扰和操控机器人;
③机器人和视觉系统比赛过程中未运行在ROS环境下;
④恶意干扰其他机器人正常比赛;
⑤准备时间超时;
⑥任何其他被视为违反规则的行为。
8.1 比赛道具说明
俄罗斯方块每个格子的底面有凹锥,与盘面上每个格子的凸锥可以重合,以此辅助俄罗斯方块与盘面的固定,如下图所示。
i:初赛
参赛队伍可下载决赛使用道具的三维模型,3D打印后用于训练和初赛。
模型下载地址:
http://annisen.com/webui/levelList.aspx?chid=40
(模型打印标准:树脂,公差小于0.2mm)
ii:决赛
决赛时各队伍所用比赛道具由裁判审查符合要求方能使用,如不符合要求或没有比赛道具需使用组委会提供的统一比赛道具。
8.2 比赛场地说明
赛事官方报名:http://www.robotcontest.cn
赛项规则详情:https://elsfk.moocollege.com/home

赛项解释交流群(QQ):486451806
报名时间
2025年3月18日-2025年6月25日
赛项咨询
(西南区域)张能国老师18883217751
(华东区域)张加种老师 13588748434
梅瑞昆老师 18855255098
(华北区域)范青亮老师 18003542422

推荐阅读
-
 链聚教科人产 · 智领具身未来——2026年教科人产协同创新研讨会报名通道开启!
链聚教科人产 · 智领具身未来——2026年教科人产协同创新研讨会报名通道开启!2026-07-21
-
第九届中国高校智能机器人创意大赛报名通道开启!
2026-03-27
-
中国机器人大赛微型五轴数控机床系统开发与装调赛项顺利举行!
2025-10-24
-
中心携手中国大学生计算机博弈大赛,共筑梦想舞台!
2024-08-16

