
产品简介
OBOT-VII是一款用于机器人工程及智能制造工程专业实践教学的六轴机械臂,额定负载3Kg,运动范围650mm,采用高精度伺服电机及谐波减速机、模块化可拆卸式本体结构设计,可进行机械臂本体装配实验。双系统设计,可实现在示教器、ROS下使用及开发。通过配套的场景应用模块,实现物体的搬运码垛、轨迹示教、零件装配等典型的工业工艺应用。
通过开展对应的实训课程,帮助学生了解工业机器人的主要机械结构、控制方式及作业特点,了解ROS系统的软件架构,熟悉工业机器人示教器的使用方法,熟悉机器人算法的快速开发、测试和验证。从而掌握机械原理、机器人示教编程、轨迹规划、机器人运动学与动力学、传感与自动控制等科目的相关知识。
产品可应用于竞赛、教学、科研等场景。
功能/亮点
-

- 结构模块化、可拆装
- 具备典型六轴工业机器人结构全要素,每个关节均可重复拆卸与装配,便于学习者全面、深度掌握机器人结构相关知识。
-
- 支持双系统示教编程
- 分别配置工业机器人操作系统和ROS系统的控制器,支持双系统随机切换使用。ROS系统提供标准接口和SDK,提供基于ROS开发的UI交互实现拖拽示教和运动学演示,支持仿真、MoveIt!和二次开发。工业机器人示教器可提供工业级示教编程和多种应用场景案例
-
- 支持多应用场景教学训练
- 配置搬运、码垛、装配、轨迹规划等多应用场景教学训练模块,夹具可快速转换,切换不同应用场景教学需求,且可联动其它设备开展实践教学
-
- 高度轻量化,极具安全性
- 具备典型的六轴工业机器人要素,可示教编程,实现桌面六自由度机械臂与安全工业机器人教学平台的自由切换。采用驱控一体直流伺服电机,使用更安全
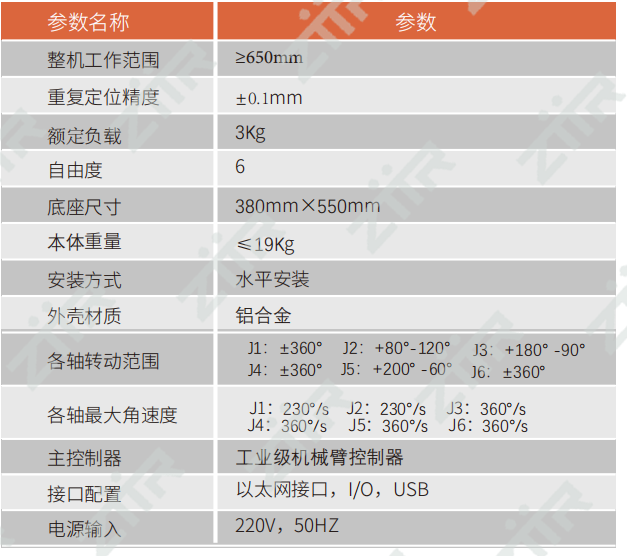
技术参数
应用案例
-
上海师范大学
-
浙江省机器人与智能装备产教融合基地
-
浙江水利水电学院
-
宁波工程学院
-
浙江工业大学

